
测量仪的种类1D激光移位计
三角测量方式
如下图所示,由半导体激光向目标物照射激光。以受光镜头聚集目标物反射的光,并在光接收元件上成像。一旦距目标物的距离变动,聚集反射光的角度也会改变,随之在光接收元件上的成像位置发生变化。 该光接收元件上的成像位置变化与目标物的移动量互成正比,因此读取成像位置的变化 量,即可测量为目标物的移动量。
- 参考距离时

- 距离接近时
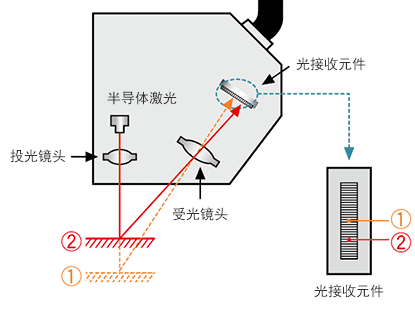
- 距离拉远时

代表产品


共焦方式
激光穿过依靠音叉快速上下振动的接物透镜聚焦在目标物上。此时的反射光汇集在针孔处,随后进入光接收元件。通过以传感器测量接物透镜在入光瞬间的确切位置,精确测量出距目标物的距离,不会受到目标物材质、颜色或倾斜的影响。

- 未在目标物上对焦时
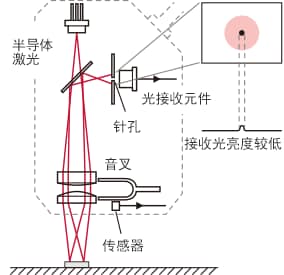 一小部分接收光穿过针孔。
一小部分接收光穿过针孔。 - 在目标物上对焦时
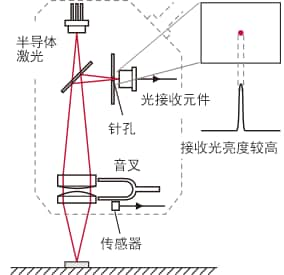 全部接收光穿过针孔。
全部接收光穿过针孔。
代表产品

分光干涉方式
SLD
从SLD发出的宽波长带宽的光,一部分在传感器头内部的参照面产生反射,透过的光则在目标物上产生镜面反射,返回到传感器头内部。
光干涉
2种反射光相互干涉,各波长的干涉光强度依参照面与目标物间的距离而定,距离为波长的整数倍时达到最大。
分光分析
通过分光仪按波长将干涉光分光处理,由此达成按波长的光强度分布。以波形分析该光强度分布,计算距目标物的距离。

代表产品