焊炬/ 机械臂的位置确认
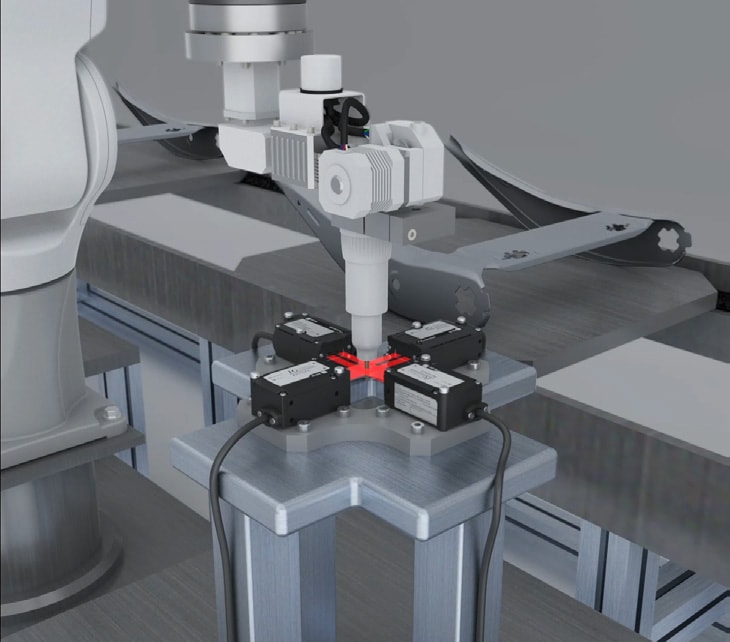
通过监视焊炬、机械臂前端的位置偏移量,可以预防焊接线偏差以及扳手位置偏移等前端变形。机器人工作时会对焊炬、机械臂前端施加负载而产生变形。因此,需要在机器人待机位置安装传感器,确认在 XY( Z) 方向是否存在偏移。由于是自动设备连续移动,仅凭人的肉眼观察,可能无法发现数毫米的焊炬位置偏移。而且,如果在机械臂前端变形的状态下进行加工、组装,还存在批量生产不良品的风险。
通过监视焊炬、机械臂前端的位置偏移量,可以预防焊接线偏差以及扳手位置偏移等前端变形。机器人工作时会对焊炬、机械臂前端施加负载而产生变形。因此,需要在机器人待机位置安装传感器,确认在 XY( Z) 方向是否存在偏移。由于是自动设备连续移动,仅凭人的肉眼观察,可能无法发现数毫米的焊炬位置偏移。而且,如果在机械臂前端变形的状态下进行加工、组装,还存在批量生产不良品的风险。
