何谓CAN?
下面将围绕在汽车等FA工业机械中也广泛应用的通信协议“CAN”进行说明。
CAN的构成
CAN是“Controller Area Network”的简称,是由德国Bosch公司开发的串行通信协议。很多人听到CAN时会想到汽车,该协议的开发完成是在1985年,而实际用于量产车是在1990年。之后在1994年由国际标准化组织(ISO)规定为标准规格(ISO11898/ISO11519)。目前已用于几乎所有的汽车上。此外还广泛用于工厂自动化(FA:工厂自动化)等领域。

CAN的必要性
目前工厂以及医疗现场等都使用CAN,但最初的开发前提是在汽车内部使用的技术。其背景是满足随着汽车向高性能化发展,电子控制单元(ECU:Electronic Control Unit)日益增多的需求。控制内容变得复杂时会导致输入输出增多,ECU随之大型化,并且在多个ECU间共享数据时配线也会增加。由此出现的结果是复杂化、重量及部件数增加以及制造成本骤增。对此现象的解决对策就是能够以少的配线进行高速而可靠的通信的串行通信协议。
不使用CAN的通信方式
- 配线条数多
- 重量增加
- 需要确保配线空间
- 由于物理性配线增加导致故障风险上升
- 在进行故障诊断时需要单独检测ECU
应用CAN的通信方式
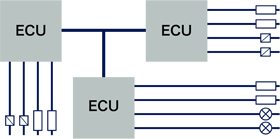
- 能够以少的线束完成连接
- 易于在ECU之间通信
- 扩展性优异
- 可由多个ECU共享1个信息
- 可在一处完成网络整体的故障诊断及处理
通信协议的种类
除“CAN”以外,车载网络中还使用“LIN”、“FlexRay”、“MOST”等通信协议。“LIN”是预计作为CAN的子网络使用的、能够以低成本进行串行通信的规格。作为下一代车载网络而受到关注的FlexRay可实现比CAN更高速的通信。CAN、LIN、FlexRay用于发动机控制等的通信,而“MOST:Media Oriented Systems Transport”预计用于多媒体类通信。综上所述,除CAN以外还有多种通信协议。
| 通信协议 | 最大通信速度 |
|---|---|
| CAN | 1Mbps |
| LIN | 20kbps |
| FlexRay | 10Mbps |
| MOST | 24.8 Mbps (还具备50 Mbps/150 Mbps规格) |
通信速度存在上述差异。但是,越是高速的通信协议其成本越高,因此应根据需要选择合适的通信协议。
CAN的种类
按照通信速度,CAN分为高速CAN“CAN-C”及低速CAN“CAN-B”。另外,在SAE(Society of Automotive Engineers)中,按照通信速度进行以下分类。
| 级别 | 通信速度 | 用途 |
|---|---|---|
| 级别A | 10 kbps以下 | 灯类、电动车窗、车门锁等 |
| 级别B | 10到125 kbps | 仪表或自动空调、故障诊断等状态信息类 |
| 级别C | 125 kbps到1 Mbps | 发动机或变速器、制动器的控制等实时控制类 |
