脉冲采集术语集
由生产各种传感器及采集设备的FA(工厂自动化)制造商“基恩士”对在脉冲采集中需要掌握的术语进行浅显易懂的说明。无论是将要着手脉冲采集的人士,还是已经导入的客户,若对脉冲采集相关术语有疑问,请务必阅览。

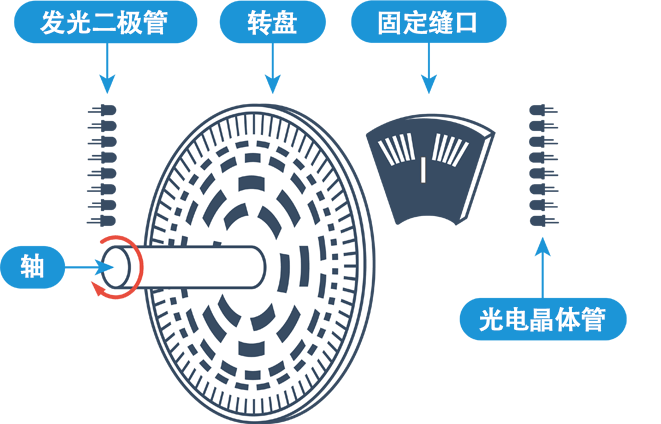
旋转编码器
所谓旋转编码器,是指将由旋转产生的机械性位移转换为脉冲信号的装置。以往被视为用于旋转角采集的检测仪,而目前其使用范围已扩展至为机器人定位的伺服等领域。旋转编码器按照采集方式,分为“增量方式”与“绝对方式”两种。增量方式时,旋转编码器的脉冲输出包括每次旋转都输出的Z相,以及不同相位的A相与B相共3种。检测直线位移的编码器称为线性编码器。
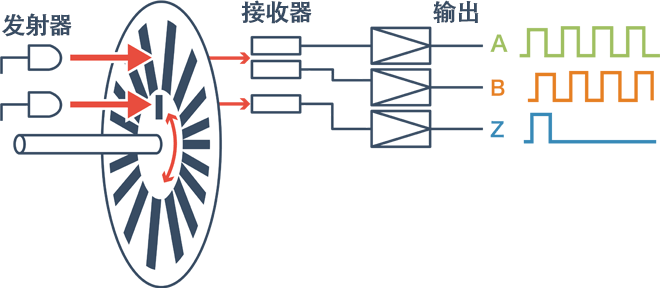

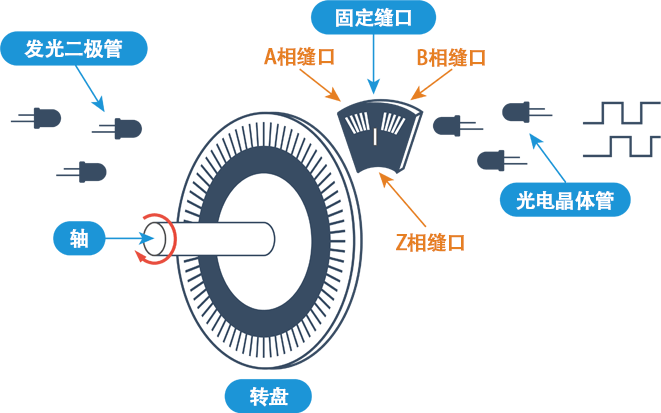
增量方式
裂缝盘的外沿上具有窗口,按照透过窗口的光的开/关来输出脉冲信号。其特点在于,能够非接触检测旋转,并依据A相与B相的输出时间点检测旋转方向。脉冲输出仅在旋转期间发生。
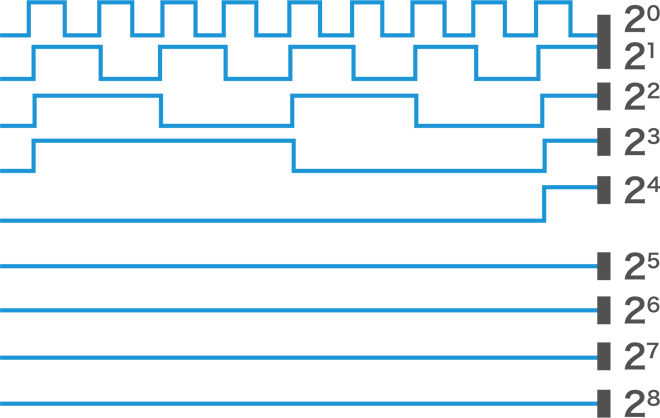
绝对方式
采集1次或1次以上旋转相对于原点的绝对角度位置的方式。裂缝盘的窗口配有不同的符号,分别输出各自的代码信号。具有抗干扰性强的特点,但为了提高分辨率需要增加位数(信号线数)。代码方式包括格雷码、二进制码、BCD码等,较为常用的是格雷码。
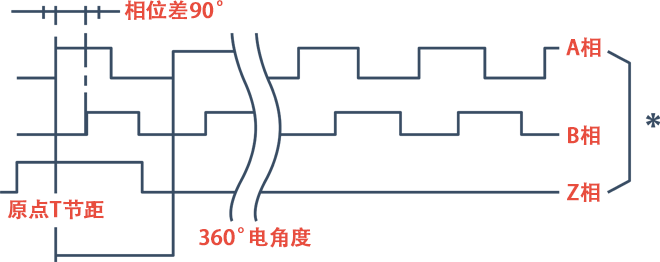
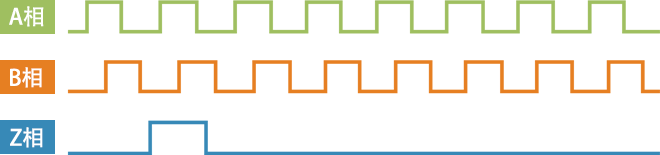
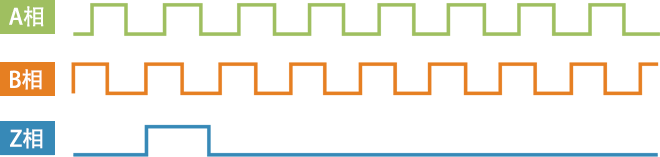
A相、B相、Z相
在增量方式的旋转编码器,每次旋转输出1次Z信号。此信号作为原点使用。A相与B相的脉冲在顺时针时,B相脉冲以相对A相脉冲延迟1/4个脉冲周期(90°)输出。在逆时针时,A相脉冲以相对B相脉冲延迟1/4个脉冲周期输出。脉冲数因分辨率而异。
分辨率
所谓分辨率,是指增量方式旋转编码器旋转1次时输出的脉冲数以及绝对型旋转编码器的绝对编号。精度随着分辨率而变化,因此应结合用途及成本选择具有合适分辨率的旋转编码器。另外,脉冲采集仪(数据采集仪)也设有可显示的分辨率。
高电平/低电平
脉冲信号以“低电平/高电平”或“0/1”描述。例如,将低电平或0作为0电位,将高电平或1作为5 V电位,转换为数字信号进行采集。
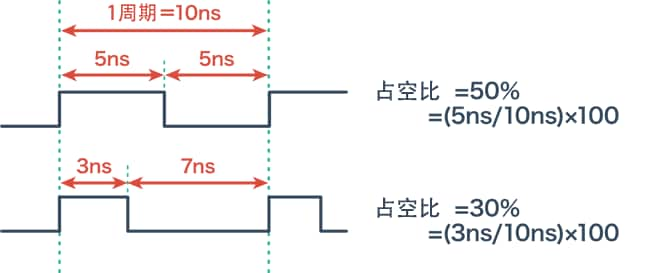
占空比
所谓占空比,是指脉冲信号周期与脉宽的比率,可通过以下公式表示。在电机控制中使用的PWM控制,这是非常重要的项目。
D = τ / T
- D :
- 占空比
- τ:
- 脉宽
- T :
- 周期