CAN的特点
CAN已经被广泛使用,下面将对其优点以及相较于其他通信方式在硬件方面与软件方面的优点进行说明。
使用CAN的优点
使用串行通信协议“CAN”的优点在于,能够以超低限度的信号线连接各种软元件。另外,由于开发初衷就是用于汽车,具有对外部干扰的高耐性。
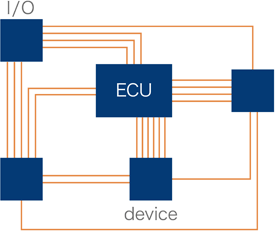
将配线控制在超低限度,实现低成本
如上所述,由于采用串行连接,仅需1根或2根信号线即可在软元件间连接。CAN只需2根通信线,能够大幅减少配线。由此可降低成本,同时抑制重量上升。

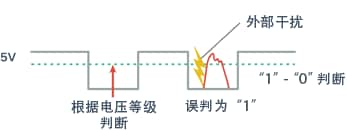
对外部干扰具有高耐性,且可靠性高
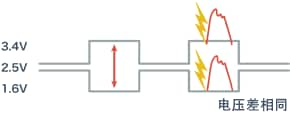
由于是以用于汽车作为前提而开发的通信协议,具有抗干扰性高的特性。高速CAN(CAN-C、C等级)采用根据2根通信线之间是否产生电压差来发送数据的“2线式差动电压方式”。由于从外部施加的干扰相同,并不产生电压差,即使发生干扰也难以受到影响。
无浪费而顺畅的数据通信
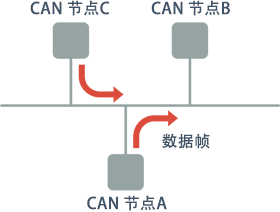
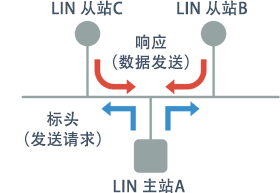
网络上的软元件称为“节点”,将连接各节点的通信线称为“总线”,CAN采用的是可从连接的节点均等访问的“多主控方式”。因此,只要总线有空闲,各个节点均可开始通信。另外,一般在数据由多个节点集中时将导致无法通信,而CAN通过执行优先发送优先顺序度高的信息的信息发送优先顺序(仲裁),实现无浪费而顺畅的通信。
- 多主控方式
- 单主控方式
实现高速而可靠的数据共享
高速CAN时实现最大1 Mbps的通信速度,装有多种错误检测机制,能够以接近100%的概率检测出各种错误。并且,只要发生1次数据发送异常,就删除各个数据,并重新向各个节点发送数据,直到成功为止。还通过仲裁或抗干扰性实现高速而安全的数据传送。
实现灵活的系统构成
CAN中包括在通信数据内加入用于识别的ID而发送的“消息寻址”。因此接收侧可从ID识别数据内容。在车载网络中易于将发动机控制数据与仪表或空调等同步。除系统构成灵活以外,由整体共享数据,因此还具有能够一次性完成自我诊断的优点。

