CAN采集术语集
对包括汽车在内的工业机械或FA(工厂自动化)、铁路、船舶等领域广泛应用的串行通信协议“CAN”,在其使用过程中应掌握的术语进行浅显易懂的说明。
CAN信号
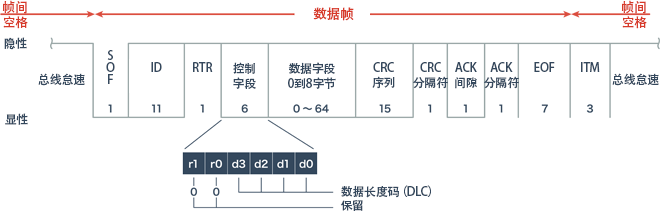
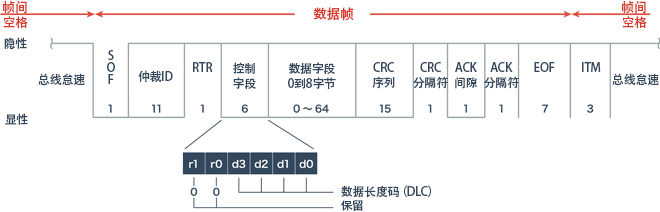
所谓CAN信号,是指包含在1个帧内的个别数据,也称为“通道”。标准格式的数据字段最长为8字节,1个数据帧最多可包含64通道的CAN信号。

CAN总线通信
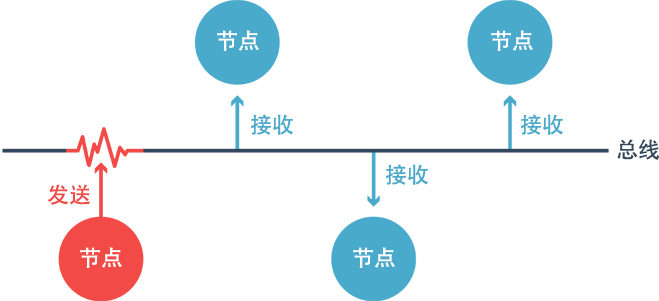
在CAN中,将通信线称为“总线”,将ECU(Electronic Control Unit)等控制装置称为“节点”,从节点经由总线向其他节点发送数据,由此称为“CAN总线通信”。另外,向总线发送数据也称为“访问总线”。通过连接多个节点来构建网络的方式有“星型”、“线型”、“环型”等,CAN采用的是线型方式。只要简单连接节点即可构建网络,因此具有设计简单的特点。
通信速度
表示1秒钟内可发送几位数据的速度,单位为“bps(Bit Per Second)”。例如,1秒钟内可发送2位数据即为2 bps,这个数字越大,越能够在短时间内发送大容量数据。在CAN中1次可发送的数据量为8字节,最大通信速度为1 Mbps(低速CAN时为125 kbps)。
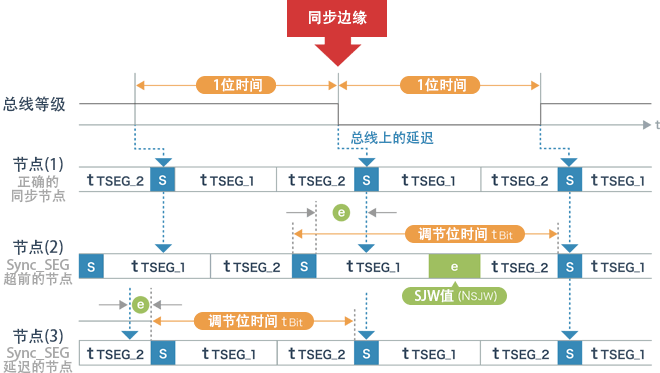
同步
进行CAN通信的节点内部含有分别决定程序的系统时钟(处理时间)的“水晶振荡器”。但由于接通电源的时间点或气温等原因,各个节点的系统时钟之间有可能发生时间差。若1位的长度发生变化,则在CAN无法进行正常通信。为防止这种情况,对各个节点的系统时钟偏差进行补正以实现同步显得尤为重要。
仲裁ID
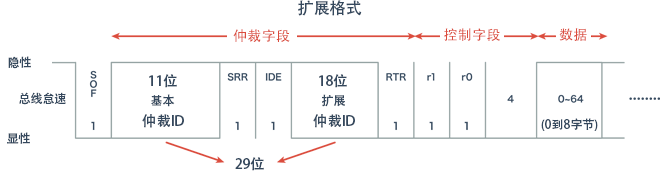
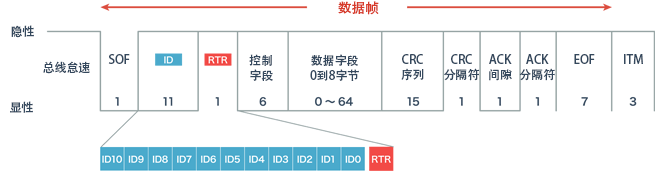
在数据帧中,位于“SOF”之后的ID被称为“仲裁ID”。数据帧ID在标准格式时为11位,扩展格式时为11位+18位共计29位。利用这个ID来识别信息,决定优先顺序。
通信调停
在CAN采用的“CSMA/CA”通信方式中,使用总线的过程中无法从其他节点发送数据。但是,在实际使用中也有从多个节点发送数据的情况。在此情况下决定优先顺序的作业就是“通信调停”。在通信调停中,ID值越小优先度越高。另外,当相同ID的数据帧与远程帧被同时发送时,仅凭ID无法识别,需经过RTR识别后优先发送数据帧。
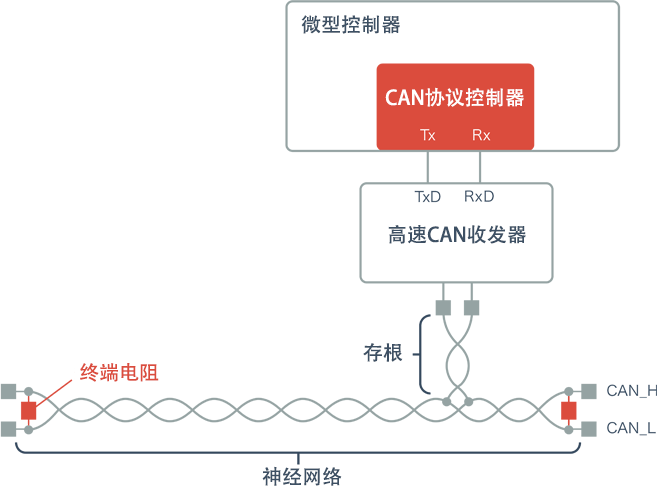
微型控制器/CAN协议控制器/CAN收发器
用于CAN通信的物理硬件,微型控制器经由CAN收发器连接于总线。相当于CAN收发数据处理节点的微型控制器装配有用于CAN协议的位填充或通信调停、CRC校验等的“CAN协议控制器”。