基本预处理
图像处理的基础是拍摄图像*拍摄清晰的图像(对比度清晰的对焦)。
而预处理功能的运用,可以对图像进行更佳加工,使其适用于检测内容。在设定瑕疵检测/尺寸测量等正式处理之前,实施拍摄及预处理更佳化,可以提高稳定检测的成功率。
下面将从原理开始,对更佳预处理功能的选择和设定方法进行说明。

基本预处理功能的种类与原理
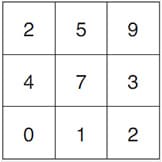
以下将以预处理功能中十分常用的4种为例从原理开始进行说明。如下所示,对各个像素进行以各像素为中心3×3的预处理计算,对图像进行加工。

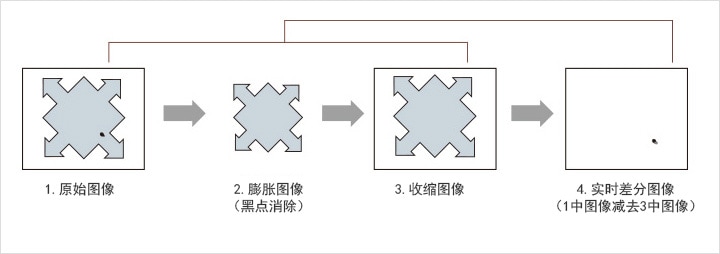
膨胀预处理
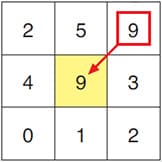
将3×3中心像素浓度,替换为包含中心在内的9个像素中最大浓度(最明亮值)的处理。有去除黑色干扰成分的效果。
收缩预处理
将3×3中心像素浓度,替换为包含中心在内的9个像素中最小浓度(最暗值)的处理。具有强调黑色像素、稳定检测出黑点等瑕疵的效果。
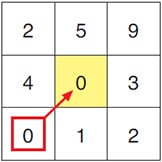
平均预处理
将3×3中心像素浓度,替换为包含中心在内的9个像素中平均浓度的处理。具有模糊图像以减少干扰成分的影响,使搜索稳定的效果。
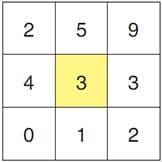
(2 + 5 + 9 + 4 + 7 + 3 + 0 + 1 + 2)/9 = 3.66
舍去小数部位取3
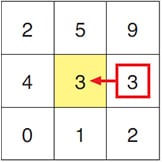
中值预处理
将3×3中心像素浓度,替换为包含中心在内的9个像素中第五位浓度的处理。与平均预处理相比,具有不模糊图像而去除干扰成分的效果。
要点
为了在视觉系统中正确再现人眼观察到的图像,拍摄清晰图像很重要,但根据不同检测目的,有时不需再现人眼观察到的图像,还可能通过强调特点(膨胀/收缩等)、通过模糊处理减少干扰成分(平均化/中值等)而得出更佳检测结果。
请牢记要对各个像素进行上述预处理,以便更好地了解预处理。

边缘抽取和边缘增强预处理功能的种类与原理
原图像对比度较低或要强调线信息时,可以使用边缘抽取或边缘增强等预处理功能。边缘相关预处理的种类较多,选择时需要具备相关原理知识。下面就利用率较高的“Sobel”、“Prewitt”、“边缘抽取X方向”、“边缘抽取Y方向”,对原理进行说明。此外,还将就“边缘增强”与边缘抽取类预处理的差别作说明。

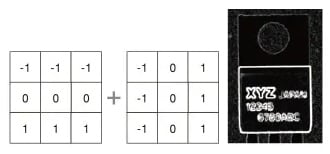
Sobel和Prewitt
利用Sobel/Prewitt在X和Y方向上分别进行边缘抽取,并对两者结果进行合成的边缘抽取处理。将3×3中心像素的9像素分别与如下系数相乘,并替换为合计出的浓度值。Sobel中央部的像素与“2”相乘,与Prewitt相比,具有强调低对比度边缘的效果,与此同时,还会抽取干扰。
Sobel
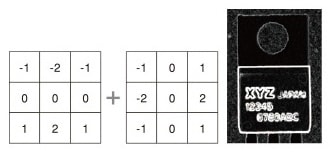
Prewitt
边缘抽取类 总结
| 微分 | 横向 | 纵向 | 斜向 | 其他 | |
|---|---|---|---|---|---|
| Prewitt | 1次微分 | ○ | ○ | △ | |
| Sobel | 1次微分 | ◎ | ◎ | ○ | |
| Roberts | 1次微分 | △ | △ | ○ | |
| Laplacian | 2次微分 | △ | △ | △ | 不依赖于方向 |
◎○△符号表示强度,◎为最强。
强度较强时,也可能抽取干扰变化。
【参考】方向指定边缘抽取预处理
边缘抽取X方向/Y方向预处理可以用于纵向瑕疵限定/横向瑕疵限定检测等,原理为Sobel预处理的方向限定处理。
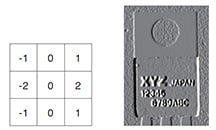
(X方向Sobel)

(Y方向Sobel)
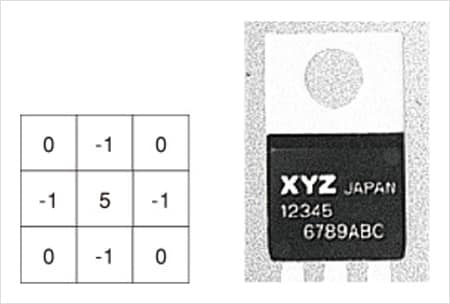
边缘增强预处理与边缘抽取预处理的区别
边缘增强,是一种可以使模糊图像变清晰的处理。
其与边缘抽取预处理的区别,就是将9像素的合计结果计为1(而非0),由此增强中心像素的浓度。
边缘抽取中,若9像素为同一数据,将合计计为0(浓度0),而边缘增强中,被增强的中心像素浓度会被残留下来。
要点
边缘抽取预处理,通常是指将3×3的中心像素浓度,根据其上下(X方向)及左右(Y方向)进行运算,实施替换的处理。必须根据需要增强的方向及干扰的有无选择种类。
此外还须注意,由于边缘增强预处理对于相对均一的部分也会增强中心像素,干扰成分将增多。
预处理技术运用案例
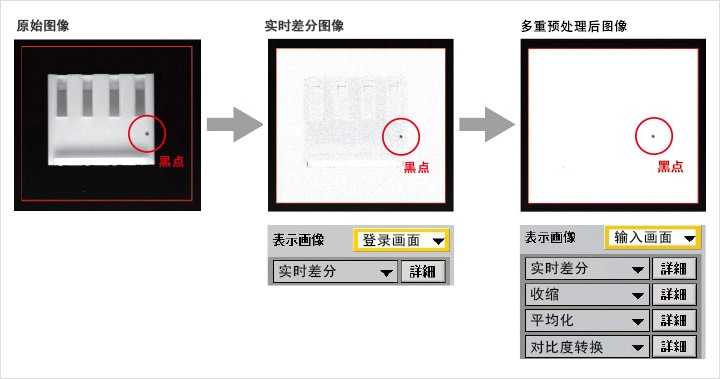
基恩士的CV-3000/5000及XG系列,可以对单个检测范围,多重设定多个预处理功能。
只要知道各预处理的原理,就能通过个别组合,实现更佳的图像加工。下面介绍相关事例。
【例1 轮廓平滑化】膨胀n次+收缩n次
通过相同次数的膨胀→收缩动作,在维持原来形状的基础上,只去除黑色的毛边形状。

使用前

使用后
【例2 强调微小瑕疵/污点】Sobel+二值化+膨胀
Sobel+二值化+膨胀(强调瑕疵)
利用Sobel及二值化只抽取瑕疵和污点,利用膨胀进行放大。

使用前

Sobel

二值化+膨胀
【例3 干扰平滑化】平均化+中值(检测值的稳定化)
消除粗糙表面影响的干扰成分,需要使用“平均化+中值”预处理。
该技术可进一步有效稳定边缘检测中的测量。
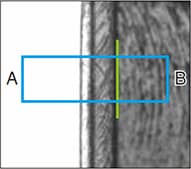
使用前

边缘强度波形(示意图)
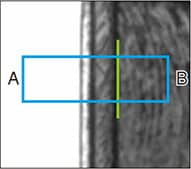
使用后

边缘强度波形(示意图)
不稳定边缘检测下的重复精度〈典型〉
| 无预处理 | 6.27像素 |
|---|---|
| 平均化+中值 | 0.3像素稳定化 |
预处理功能前篇 总结
关于预处理,请牢记以下基本点。
- 首先是拍摄清晰的原图像(=对比度清晰的对焦)。
在此基础上,若有需要增强的部分,使用图像加工=预处理功能。 - 常规预处理,是指使用适用各类系数的周边浓度值,将3×3的中心像素替换为需要增强的结果。
- 只要掌握各项功能的原理,分用途使用有效的预处理功能,或组合使用各功能,就能够稳定检测。






![图像处理 应用示例集 [运输行业]](/img/asset/AS_71700_L.jpg)

![图像处理 全新应用示例集 [食品/医药品行业]](/img/asset/AS_72815_L.jpg)
![图像处理 全新应用示例集 [电子零件/电子设备行业]](/img/asset/AS_86832_L.jpg)