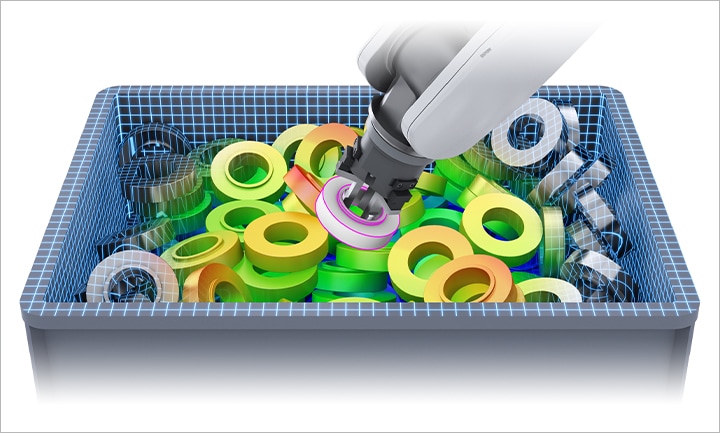
支持散装拣选的三维机械手视觉系统

导入工业用机械手时,不仅要选择合适的机械臂和机械手,还要对周边装置及设备进行调整。除此以外,作业人员的学习和经验也相当重要。为了解决这些课题,人们将视线聚焦到了“三维机械手视觉系统(3D机械手视觉系统)”上。本次,我们将以需求尤为突出的散装拣选用三维机械手视觉系统为例,介绍导入的优点及注意事项,并对基恩士三维机械手视觉系统“CV-X480D”的优异性等进行说明。

何谓散装拣选
散装拣选作业,就是对部件箱等容器内的散装工件进行拣选。例如,在组装产品时将工件从部件箱中拣选出来,或是根据不同收货地点进行分拣纸箱的堆垛/卸垛。
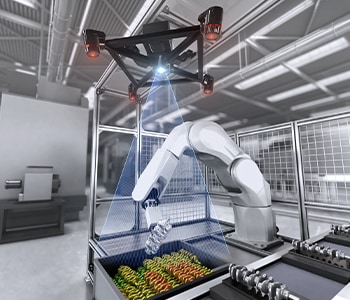
机械手的散装拣选作业,不光要用到工业用机械手,还必须配备识别工件位置的“相机(传感器)”,以及根据拍摄所得图像数据来控制机械臂的“图像处理系统”。尤其是在立体堆叠工件的散装拣选中,不仅要识别横纵方向,还要对高度等空间信息进行识别。因此,不能采用二维机械手视觉系统,必须导入三维机械手视觉系统。
可进行散装/堆叠拣选的工件
相信大家在研究导入三维机械手视觉系统的过程中,都会提出这样一个问题——“各种工件都适用吗?”。 对于多曲面形状、柔软物体、结构复杂的部件等各式各样的部件、产品,三维机械手视觉系统均可进行高精度的三维识别。因此,不论是螺丝、螺栓、齿轮、连杆之类的小型汽车部件,还是车门窗框、消声器等大型部件,不管是金属材质还是树脂、橡胶产品,均可准确识别。对于各类形状(圆柱形、薄板等)和材质(表面反光材料、砂面材料等)的部件、产品也可准确识别。

曲轴

连杆

变速箱

散热器

差速齿轮

等速万向节(CVJ)

冲压金属件

螺栓

汽车空调部件

烧结金属件

电池
各工件 三维机械手视觉系统 应用视频
可以对各类形状/材质的工件进行稳定拣选。详情请查看下列视频。





举个例子,对于形状复杂、分量较重的汽车发动机曲轴等部件,只要有效利用三维机械手视觉系统,同样能进行散装拣选。以曲轴为代表的锻造材料较为沉重,重复进行人工拣选,会对作业人员的身体造成较大的负担。还存在因掉落引发事故的危险性。利用三维机械手视觉系统进行散装拣选,可根据拍摄所得的数据,抓握曲轴的中心轴部分,切实完成抓取与放置。这不仅能减轻作业人员的身体负担,还可杜绝事故的发生。
散装拣选的优点
导入三维机械手视觉系统拣选散装工件,能带来许多好处。下面将围绕基于机械手的自动化散装拣选,对相关优点进行介绍。
- 优点1缓解劳动力短缺
- 生产现场正面临着日益严峻的劳动力短缺问题。用机械手替代人工完成拣选作业,有助于缓解劳动力短缺。
- 优点2削减人工费
- 用机械手替代人工进行散装拣选,不会产生加班费等薪酬支出,可有效削减成本。机械手可进行24小时不间断的稳定运行。
- 优点3部件进料的自动化
- 在二维机械手视觉系统的生产现场,会利用供料器、夹具等工具,对部件进行整列,以便机械手实施拣选。而在使用三维机械手视觉系统的散装拣选中,可省去上述的部件整列作业。故而可削减人力和工时,有助于提升生产效率。
- 优点4防止不良品的产生
- 利用三维机械手视觉系统拣选散装工件,可减少在进行工件整列时发生的忘记放置、方向放反等人为错误。还能有效预防此类人为错误导致的不良品问题。
- 优点5有效利用空间
- 作业工序和生产品种增加时,供料器和夹具的数量也会增多,难以确保安装位置。但是,如果用三维机械手视觉系统进行散装拣选,可以将供料器等周边设备的用量降至理想程度,在有限的空间内构建生产线。
- 优点6稳定作业速度
- 人工摆放工件或将工件投放至机械手时,作业人员的熟练度会使作业速度产生差异。但是,如果能实现包含散装拣选在内的全流程机械手作业化,就能将作业速度的差异降至理想范围,缩短产距时间。
- 优点7也可支持大型工件
- 人工进行拣选作业时,如果要面对大型工件或沉重的工件,会对作业人员造成较大的负担。某些工件可能还必须由多名作业人员同时操作。利用机械手,不论是大型工件还是沉重工件,都能进行安全准确的拣选。
三维机械手视觉系统的实际应用
下面将围绕三维机械手视觉系统的实际应用,以“散装拣选”、“堆垛/卸垛”、“堆叠拣选”为例,进行介绍。除此以外,三维机械手视觉系统还可用于各类用途,如有需要,请务必详询基恩士。基恩士将为您提供适宜的三维机械手视觉系统导入方法。
散装拣选

二维机械手视觉系统的拣选需要将工件装设到夹具上,或将部件排列在零件托盘上,安装供料器等,费时费力地进行拣选。而利用三维机械手视觉系统进行拣选,则可识别散装部件,进行随机拣选。可有效削减用于工件整列的工序和人力,以超少的周边设备实现高效拣选。
堆垛/卸垛

将货物装载到车辆或托盘上的“堆垛”作业,以及将货物卸下的“卸垛”作业。如需实现上述作业的自动化,必须借助“堆垛机”、“堆垛系统”等专属装置。但是,只要利用三维机械手视觉系统,凭借常规工业用机械手同样可完成这些作业。还无需配备专属装置,具有可支持多品种的优点。
堆叠拣选

纵向堆放箱子等物品的作业被称为“堆叠”,此类逐步改变堆放位置的作业,同样是三维机械手视觉系统的适用领域。采用三维机械手视觉系统,不仅能判断纵/横方向,还能正确识别高度,辨别逐渐变化的工件位置。还能识别品种,在多种工件混合存在的情况下,也能完成堆叠拣选作业。
机械手视觉让作业变得更加自由!FA机械手拣选案例

基恩士三维机械手视觉系统的特点
基恩士推出了支持散装拣选的三维机械手视觉系统“CV-X480D”。下面将为您介绍基恩士的三维机械手视觉系统“CV-X480D”,说明它的具体特点。
在深箱中也能切实抓取工件
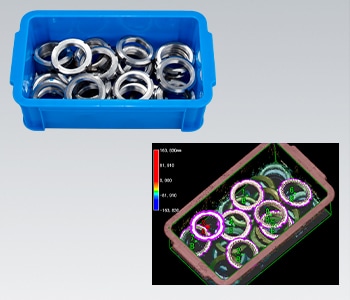
三维机械手视觉系统“CV-X480D”可实现不易受方向性及死角影响的检测。由于4台相机可生成无死角的图像,三维检测能在超快的速度内提供适宜的检测结果。还能识别工件的位置和朝向,实现稳定检测。以深箱中的工件为例,“CV-X480D”可以在不与箱体及其他工件相撞的情况下完成拣选。
根据周围环境自动计算出机械手动作
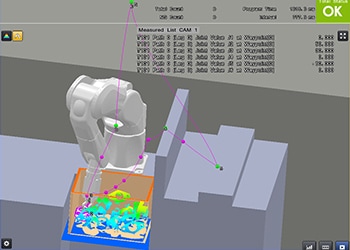
三维机械手视觉系统“CV-X480D”配备了“路径生成工具”,可自动计算轨迹,在避开障碍物的同时,不干扰机械臂。有效利用该功能并设定环境布局,可根据周边设备干扰及机械手姿势,自动计算出使臂部不会干扰箱体、避开障碍物的轨迹。还配备了可事先验证拣选效果的“拣选模拟器”,只要有效利用该功能,就能避免启动时的浪费,使工件拣取的成功率得到飞跃性的提升。
无需工序切换和工件储料器,实现部件投放自动化

导入三维机械手视觉系统“CV-X480D”后,不再需要工序切换和工件储料器,可实现自动化部件投放。能以更少的工时覆盖多种工件,实现产距时间的大幅缩短。“CV-X480D”还配备了一键即可完成操作的“三维自动图像校正”,省去了手动调整的时间和精力,可实现顺利启动。
空间有限时也能导入工业用机械手

使用二维机械手视觉系统,在导入工业用机械手时,必须配备架台、传送带、储料器等周边装置及设备。而导入三维机械手视觉系统后,不再需要这些配套装置,在空间有限时也能导入工业用机械手,实现工序的自动化。此外,用户只需更改程序,就能将其用于多种工件,适用于支持多品种生产的流水线设计。
路径生成功能/拣选模拟器 应用视频
基恩士的产品可考虑到周边设备干扰及机械手的姿势,自动计算出适宜的机械手路径。下面将以视频的形式,向您详细介绍。




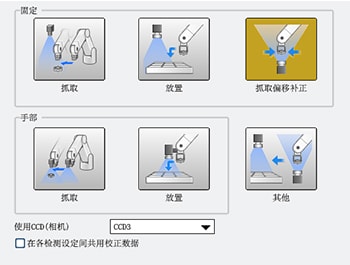
搭配使用三维机械手视觉系统与面型相机
除了三维机械手视觉系统自带的相机以外,基恩士的三维机械手视觉系统“CV-X480D”还可选装面型相机扩展单元,从20种相机中自由选择多达2种。借助上述扩展单元,用户不仅能用三维机械手视觉系统拣选散装工件,还能利用面型相机(二维机械手视觉系统),实现抓取偏差补偿、品种识别、放置位置偏差补偿等功能。搭配使用三维机械手视觉系统和面型相机,不仅能提升精度,还能同时开展其他作业。这样的高度发展性,也是基恩士三维机械手视觉系统的魅力所在。

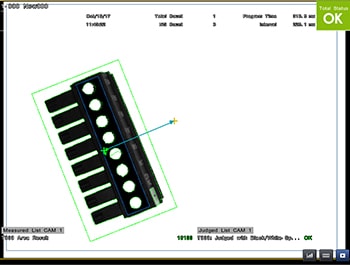
抓取偏差补偿/品种识别
通过二维机械手视觉系统对散装拣选后的工件进行高精度定位。同时对工件的品种、表面反面、方向等进行识别。
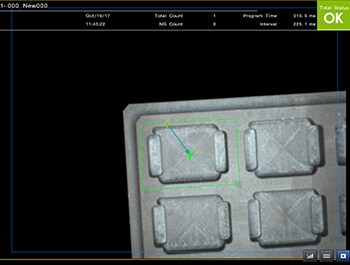
放置位置偏差补偿
用二维机械手视觉系统检测放置托盘的位置偏差。将通过抓取偏差补偿获得的偏差量与托盘位置偏差量结合起来计算,得出适宜的补偿量。
可与二维机械手视觉系统轻松实现联动
基恩士的“CV-X480D”能够轻松地与二维机械手视觉系统进行联动。只需根据补偿动作选择适合的应用,即可在短时间内完成妥善设置。

可以在拣选散装工件的同时,开展品种识别、有无检测等
搭配使用面型相机,即可在利用三维机械手视觉系统拣选散装工件的同时,开展品种识别、有无检测等,让作业效率更高。

基恩士三维机械手视觉系统受到青睐的理由
最后,将为您介绍基恩士三维机械手视觉系统“CV-X480D”的优点,以及它备受客户青睐的理由。
专属设计的光学系统
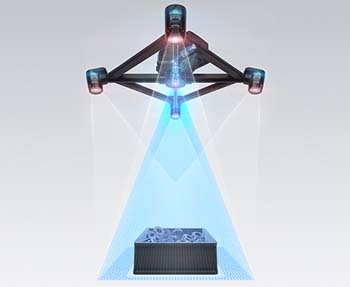
三维机械手视觉系统“CV-X480D”使用4台相机从不同角度进行拍摄,可生成无死角的稳定三维图像。还配备了高精度CMOS传感器、高速处理器、专属设计投影仪,可实现高精度、高速、高性能的工件检测。
散装环境的再现

三维机械手视觉系统“CV-X480D”可利用专属物理引擎,逼真再现散装状态。无需准备工件及箱子的实物,即可在计算机上进行物理模拟。能够在计算机上进行与现场环境相近的模拟,可省去准备实体设备的麻烦。
配备路径生成工具
三维机械手视觉系统“CV-X480D”配备了“路径生成工具”和“拣选模拟器”,能够在计算机上进行模拟。利用路径生成工具设定环境布局,即可在避开障碍物的同时,自动计算出适宜路径。不仅能在画面上配置机械手、箱体、障碍物,还可对工件的抓取位置等进行示教,上述功能只需操作鼠标即可完成,具有无需预先掌握相关知识的特点。
如果您想进一步了解基恩士的三维机械手视觉系统“CV-X480D”,请查看下列资料。




![图像处理 应用示例集 [运输行业]](/img/asset/AS_71700_L.jpg)

![图像处理 全新应用示例集 [食品/医药品行业]](/img/asset/AS_72815_L.jpg)
![图像处理 全新应用示例集 [电子零件/电子设备行业]](/img/asset/AS_86832_L.jpg)